
引言
这个故事开始于我大四上学期的深秋,它的起点是很低落的。那时候我感觉自己的大学生活已经彻彻底底地“失败了”,“结束了”。很多生活的不如意烦恼着我,平均每两天我就得去游一次泳,因为只有游泳的时候感觉自己很自由很快乐,这几乎成为了我续命的事务。
一次游泳结束后,走向食堂的小路上,看着周边的夕阳,回想自己在这个学院学习的几年时光,让我很难以释怀的诸多事情之一就是自己作为一个工科学生,虽然锻炼了很多工程能力,但是没有一个机会让我真实地展示出来。从大一的车载地面站,到大二上的载人机,到扑翼机。这些项目大多做到一半就因为人事原因和其他不可抗因素而终止了,实在是很可惜。 我也想看到自己造的飞机成功地飞一把啊!于是我看到cadc有关消息就去报名参加比赛了。
cadc对于我一个已经大四上的人来说,基本没什么作用了。即然一切都已无法改变,那还不如珍惜这点时间做点自己开心的事情把,开始干吧!
这些便是写在前面的话,也是我的初心把。后面的内容主要是偏技术经验总结,但是我为什么要把这个放在最前面呢?那便是想说明:如果你也参加cadc,不管怎么样,希望你不是为了最后那个小小的奖杯,因为她真的不是一个 产出/投入 很有优势的比赛,在最后的比赛上成功地飞出来固然很好,但是还有很多队伍在最后环节一个失误便会葬送他们前面所有的日日夜夜的努力,所以,想要得奖,想要刷简历,想当人上人,不要选择cadc,但是如果,你也能放下一些成败心,只想看到自己的飞机畅快地飞行,看到自己的智慧在自己的飞机的设计上闪着光,那么十分欢迎你继续往下阅读!
垂起比赛要求
2020年的垂起比赛要求其实挺简单。限制两个电机,一块80g以内的动力电池,需要飞行器进行多次装载、绕飞、投球的过程。3min之内,谁投的多,投的准,谁的分数就更高,另外,没有降落分!
构型确定
由于这是SJTU第一次参加这个比赛,我们也没有什么经验。所以我们仔细观看了往届各个参赛队伍的参赛视频,然后选出了:具有可行性+飞行性能不错的设计形式,主要有:
-
圆筒机身固定翼吊机方案
-
横列式倾转双旋翼
-
纵列式倾转双旋翼
其中,第一种方案对于飞手要求太高,我们第一年参赛,疫情还占用了一个学期的备赛时间,飞手无法进行十分长期稳定的训练,所以我们首先放弃;第二种方案的控制难度太大,需要研究垂起转平飞过程的飞行控制,我们没有太多的信心能完全突破,所以也放弃了;所以我们选择了第三种方案——纵列式倾转双旋翼。
总体介绍
不多说废话了,上图!
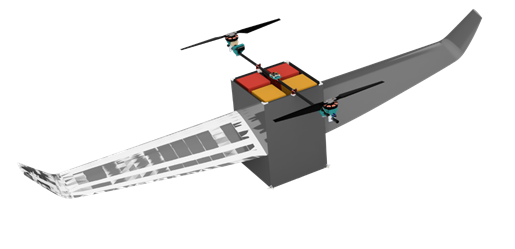
控制方式:
- roll : 舵机同向倾转
- picth : 电机差速
- yaw : 舵机反向倾转
垂直转平飞转换:
其实这个过程是**“伪转平飞”**,固定翼模式只需要电机保持较大的差速,使得机身倾转角度变大同时前飞,然后使得机翼提供一部分升力即可。